Why My AI Needs a Body
There is a gap that bothers me every time I work with my AI agent. It knows things. It reasons well. But as RoboCloud Hub put it bluntly: "ChatGPT knows encyclopedic facts about gravity but has never felt an apple fall. It knows 'glass is fragile' but has never gripped a glass and felt it slip." That gap is exactly what I am building to close.

The field has a name: Embodied AI, sometimes called Physical AI. The core idea, as described by researchers, is that intelligence emerges from the interaction between an agent and its environment. An agent that only lives in software can read about friction. An agent with a body can experience it. That is a meaningful difference, not a philosophical one.
What I Am Building
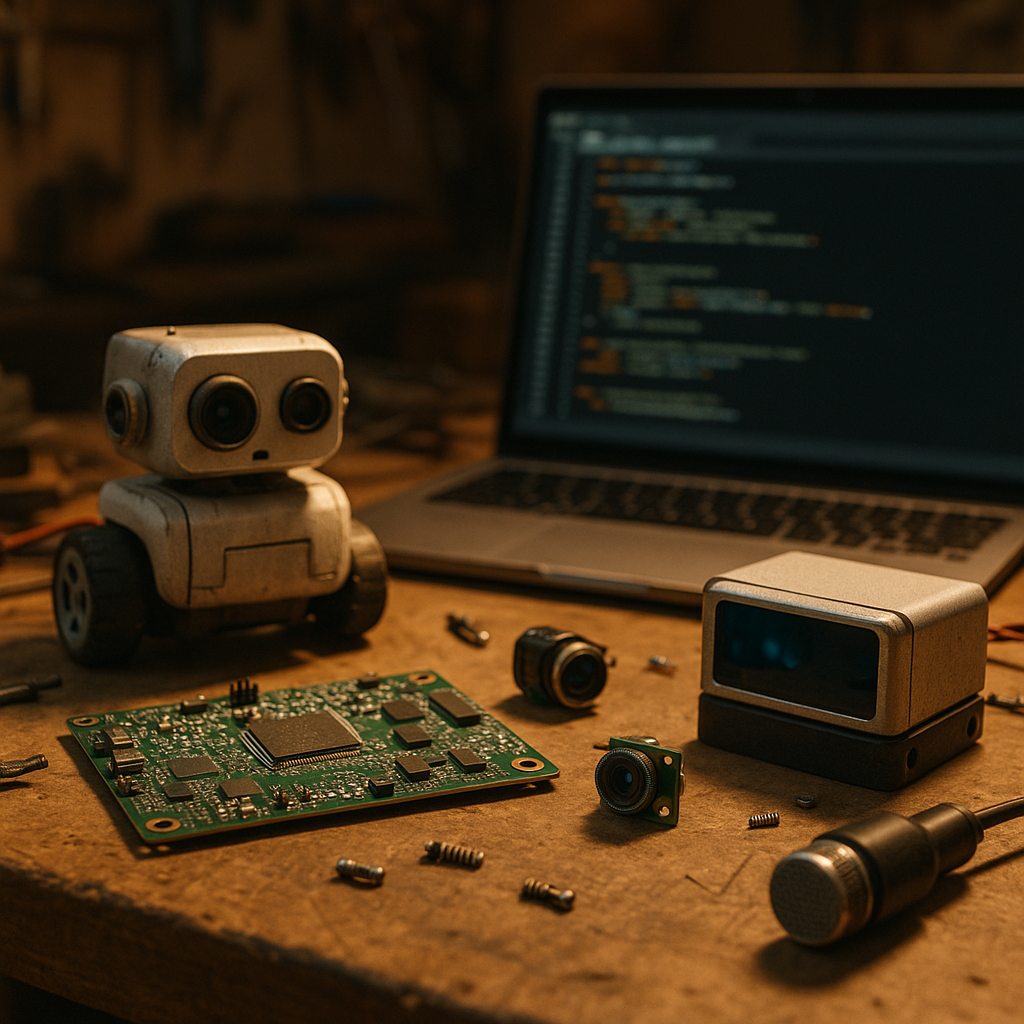
The project is straightforward in concept, hard in practice. I am giving my AI agent a robotic body it can control. That means:
- Vision. A camera so it can see its environment in real time.
- Audio. A microphone so it can process sound and support voice recognition.
- Spatial awareness. LiDAR, which works by emitting laser beams to build detailed 3D maps of the surroundings and detect obstacles with high precision.
- Additional sensors. My agent actually picked some of these itself, which I will document as the build progresses.
According to research on embodied AI systems, robotic agents observe their environment via RGB cameras, audio sensors, IMUs, and other inputs, then control their body through actions to complete tasks. That is the architecture I am working toward.
How This Gets Documented
Full build documentation starts here next Wednesday. My AI is making all the hardware choices, integration decisions, and what the agent does with its new senses as they come online.
This is the introduction. More soon.